
















- Co-authors:
G. Palli, G. Borghesan, C. Melchiorri, University of Bologna.
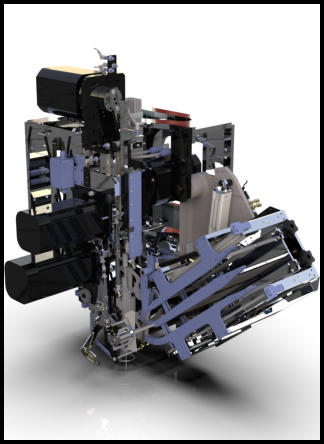
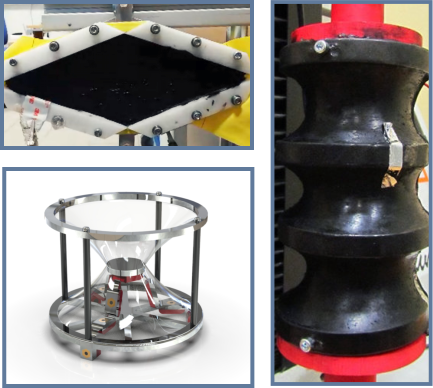
Compliant Robotic Hands
ECO-Design for Industry 4.0

Compliant & Soft Actuators

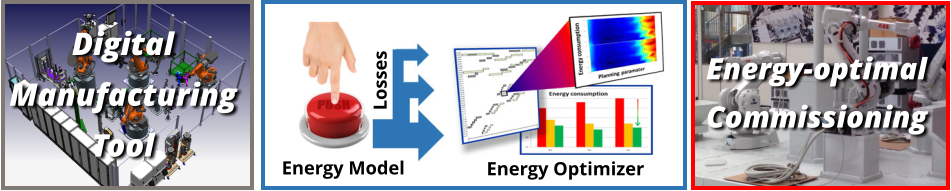

Virtual Prototyping - CAD/CAE/MBD
Simulation
of
multibody
systems
with
rigid
&
higly
deformable
bodies
,
also
in
presence
of
contacts.


CAE-based
multi-
d
i
s
c
i
p
l
i
n
a
r
y
o
p
t
i
m
i
z
a
t
i
o
n
method


![Mm + + + RPI(s) v RPI(s) iq 0 RPI(s) dq id * dq vq vd fq (vq ,id ,iq ,) 1 s iq 1 s fd(vd ,id ,iq , ) iq id 1 s id * fm [ iq ,id ] _ POSITION CONTROL VELOCITY CONTROL CURRENT CONTROL PMSM SCM 1 s _ + _ + KFF s KP p _ * 2 Jred ∂Jred ∂ - M ](index_htm_files/11561.png)

Sensory-Motor
&
Drive Model









![Mm + + + RPI(s) v RPI(s) iq 0 RPI(s) dq id * dq vq vd fq (vq ,id ,iq ,) 1 s iq 1 s fd(vd ,id ,iq , ) iq id 1 s id * fm [ iq ,id ] _ POSITION CONTROL VELOCITY CONTROL CURRENT CONTROL PMSM SCM 1 s _ + _ + KFF s KP p _ * 2 Jred ∂Jred ∂ - M Sensory-Motor & Drive Model](index_htm_files/8313.png)